
Join devRant
Do all the things like
++ or -- rants, post your own rants, comment on others' rants and build your customized dev avatar
Sign Up
Pipeless API

From the creators of devRant, Pipeless lets you power real-time personalized recommendations and activity feeds using a simple API
Learn More
-
After reading a lot of cryptography, I realized that it would be best if Alice and Bob just talk in person13
-
Boss: "I don't want to comply with the GDPR"
Me, DPO: "I've told you the house rules. You must comply, stop arguing"
Boss: "But I don't want it. Bobby doesn't have to, and Eve doesn't have to, their moms are cool"
Me: "I don't give a crap about the other kids, you're going to be GDPR compliant. Bob and Eve will end up being raped in prison. It's that what you want?"
Boss: "What if I just pretend to do it."
Me: "I'll take away all your marketing toys. No more mailchimp for you young man."
Boss, crying: "You wouldn't touch my Facebook pixel!"
Me: "Especially your Facebook pixel. I'm so sick of that thing...."
Me: "...Look, you can still play with your toys, all I'm saying is you need to be honest and ask your buddies for consent before you put your pixels up their various holes"
Boss: "But they will never agree!"
Me: "Maybe that is good thing"
Boss: "But how will we get people to like us if I can't feed them pills and insert probes into their holes to measure their responses?"
Me: "Maybe you should focus on being a nice kid, someone people like to play with. Your buddies will tell other kids that you're a nice guy. Now, I'm not going to lie to you, it will be hard work. Much more effort than what you're doing now. But you know, those friends will stick with you for decades, instead of just until the marketing-drugs wear off"
Boss: "I think I want a new mom"
Me: "You signed a contract. You're stuck with me for the next 2 years. And as long as you're living under my roof, you will follow my rules."14 -
*at work* (fictional names)
Kevin (linux support engineer): Bob, could you come for a second to take a look at something?
Bob (senior linux engineer): *tiny voice from a corner behind a desk* bob is not available right now. Please try again later.
Kevin: Bob, please, just for a second!
Bob: bob is not available right now, please try again later.
Kevin: Boooooooooooooob, come heeeeereeeee
Bob: as said before, bob is not available right now, try again later.
Kevin: but booooooob, come oooooon.
Bob: it seems that you might have a hearing problem since bob is still not available.
Kevin: but booooohooooob, come heeeeeeeeeeereee
Bob: it seems like the person on the other side of this line might be retarded. Bob is not available right now.
Kevin: But boooohooooohooooooob come oooohooohooon, just for a seeehehecond *starts fake sobbing"
Bob: Bob is getting real tired of your shit. Leave bob alone.
😆14 -
Sales employee Bob wants a clickable blue button.
Bob tells product owner Karen about his unstoppable desire for clickable blue buttons.
Karen assigns points for potential and impact (how much does a blue button improve Bob's life, how many people like Bob desire blue buttons)
Karen asks the button team how hard it is to build a button. The button team compares the request to a reference button they've built before, and gives an ease score, with higher score being easier (inverse of scrum points).
These three scores are combined to give a priority score. The global buttonbacklog is sorted by priority.
Once every two weeks (a "sprint") the button team convenes, uses the ease scores to assign scrum points. Difficult tasks are broken up into smaller tasks, because there is a scrum point upper limit. They use the average of the last 5 sprints to calculate each developer's "velocity".
The sprint is filled with tasks, from the top of the global button backlog, up to the team's capacity as determined by velocity. Approximate due dates are assigned, Bob is a happy Bob.
What if boss Peter runs into the office screaming "OUR IMPORTANT CLIENT WANTS A FUCKING PINK BUTTON WHICH MAKES HEARTS APPEAR"?
Devs tell boss to shut the fuck up and talk to Karen. Karen has a carefully curated list of button building tasks sorted by priority, can sedate boss with valium so he calms the fuck down until he can make a case for the impact and potential of his pink button.
Karen might agree that Peter's pink button gets a higher priority than Bob's blue button.
But devs are nocturnal creatures, easily disturbed when approached by humans, their natural rhythms thrown out of balance.
So the sprint is "locked", and Peter's pink button appears at the top of the global backlog, from where it flows into the next sprint.
On rare occasions a sprint is broken open, for example when Karen realizes that all of the end users will commit suicide if they don't have a pink heart-spawning button.
In such an event, Peter must make Bob happy (because Bob is crying that his blue button is delayed). And Peter must make the button team of devs happy.
This usually leads to a ritual involving chocolate or even hardware gift certificates to restore balance to the dev ecosystem.22 -
Meanwhile at NSA:
Alice: Uhm... Bob? I lost my SSH key...
Bob: *facepalms*
Alice: ... but i still have the public key! Could you please recalculate the private one for me?
Bob: Sure, give me a second. I'll fax it to you when it's ready.
Me: *wakes up from nightmare*13 -
"I have a terminal illness"
*room goes silent*
"so I stopped using the terminal"
*bob throws his keyboard at me*5 -
My colleague sent me this. Think before you act!
Hi Bob,
This is Alan next door. I’m sorry buddy, but I have a confession to make to you.
I’ve been riddled with guilt these past few months and have been trying to pluck up the courage to tell you to your face but I am at least now telling in text as I can’t live with myself a moment longer without you knowing.
The truth is, I have been sharing your wife, day and night when you're not around.
In fact, probably more than you, particularly in the mornings after you’ve left for work.
I haven’t been getting it at home recently, but that's no excuse I know.
I can no longer live with the guilt and I hope you will accept my sincerest apologies.
My wife has known for some time now and I’ve promised her that it won't happen again.
Regards, Alan.
Bob, feeling anguished and betrayed, immediately went into his bedroom, grabbed his gun, and without a word, shot his wife twice in the head, killing her instantly.
He returned to the lounge where he poured himself a stiff drink and sat down on the sofa.
He took out his phone to respond to the neighbour's text and saw he had another message:-
Hi Bob,
This is Alan next door again.
Sorry about the slight typo on my last text, I expect you worked it out.
Anyway, but as I’m sure you noticed, my predictive text changed ‘WiFi’ To ‘Wife’.
Hope you saw the funny side of that.
Regards, Alan.8 -
Was working and decided to go get a drink so I Took my headphones off.
Just in time to hear a colleague say: (in Dutch it sounds better) Beste Bob, krijg de tering.
English equivilant: dear bob, go fuck yourself.
Giggled hard 😆19 -
Normal people talking:
Alice: Are you on Facebook?
Bob: No.
Alice: OMG!!! YOU'RE NOT ON FACEBOOK!? Do you live under a rock?
Programmers talking:
<Replace all instances of Facebook with github>9 -
Bob?
Yeah?
Bob, could you hand me that paperclip?
Sure mate!
Thanks.
Oh... Bob?
Uhhh... yeah?
Could you also hand me that paperclip?
Right... sure, of course.
Thanks.
Bob?
What?
Could you also hand me the next paperclip?
Fuck off, why don't I just give you the whole fucking box!
Yeah Bob, please, throw the whole fucking box.
Wait, is that a printed screenshot of my code you're attaching the paperclips to?
It sure is, Bob. 16
16 -
So... I just remembered a story that's perfect for devrant.
My brother got into engineering in university, and during the second semester they had their introductory class to programming. They had weekly homeworks that the lecturer would check and give grades accordingly.
The factors that could influence the grading were: execution (meaning that the code would excecute as intended), efficiency and readabilty. The weeks passed and everyone was doing well, getting fairly good grades. Everyone was happy.
Until one day a random guy we'll call bob got the worst grade possible. Bob wasn't a bad student. He had over-the-average grades in all the weekly homeworks and even impressed the professor in some. Naturally, he was baffled when he saw his grade on the google spreadsheet. He was pretty sure his code ran well. He always tested it on different machines and OSs. So, at the end of the class, he went straight to the helper of the class, in a pretty imperative manner, to demand to know how the fuck he got that grade. It's impossible he got excecution, efficiency and readabilty, wrong. All three wrong? Impossible. Even the stupidiest kid in the class had some points on readabilty.
"Oh, so you are Bob. Huh?" said the helper in a laid-back attitude. "Come with me. Prof. X is waiting for you in his office."
This got Bob even more confused. As they approached the office, the courage he had in a first moment banished and gave way for nervousness and fear.
The helper nocks the door. "Prof., Bobs here"
As soon as Bob sits in the chair in front of Prof. X's, he knew something bad was coming.
"In all these years of teaching..." said Prof. X hesitantly. "In all these years of teaching I have not come even close to see something similar to what you've done. You should be ashamed of yourself." Needless to say, Bob was panicked.
"In all these years I have not seen such blatant mockery!" added the professor. "HOW THE FUCK DID YOU EVEN DARE TO SEND A HOMEWORK WITH SUCH VARIABLE NAMING" That's when Bob realised the huge mistake he made. "NEVER IN ALL THESE YEARS I HAVE SEEN SOMEONE NAME HIS VARIABLES *opens the file on his desktop *: PENIS, SHIT, FUCKSHIT, GAYFUCKING<insert Prof. X's name>MAN, GOATSE, VAGINAVAR, CUMFUNCTION, [...]" The list of obcenities went on and on. In each word, the professor hit the table harder than the last time.
Turns out Bob felt so in comfort with the ease of the course he decided to spice things up by using "funny naming conventions" while coding, and then tidying everything up before uploading the homework. This week he forgot, and fucked it big time.
So remember folks, always check your code before committing/giving it in/production. And always adhere to naming conventions.9 -
Boss: "Why weren't you in the project meeting? You were supposed to present!"
Me: "I'm not on that project, Bob was before he quit."
Boss: "Yeah, but I assumed you'd take it over. We need you to be working on it."
Me: "What? I don't know anything about it, nothing."
Boss: "Yeah, but you guys went to lunch together, what else would you have talked about?"8 -
This happened a while ago but I till remember it. I'm an Intern within a nice company where everything is open (one big ass room):
Designer: bob
Salesman: peter
(Random names)
Bob: Hey peter, these PDF files you got from the client are corrupt, could you ask him for good versions?
Peter: [on the phone with PDF client coincidentally] Sir, the pdf's you send are corrupt according to our designer.
.............…….............................................
He says that it must be you using a weird operating system.
Bob: Hey dude (me), could you check?
Me: Sure (checked on my Linux, corrupt indeed), yup deffo corrupt or something.
Peter: [on phone] Sir, they really seem to be corrupt. [Talking on phone] He says it must be your operating systems, can it be that your systems are fucking this up?
Me and bob: Highly unlikely!
Peter to client: Dear sir, I've got two very competent professionals here who say you are not right and the document is simply corrupt and I'm definitely going to trust them on this one so may I kindly request a new version!
He is a great salesman!7 -
I’m surrounded by idiots.
I’m continually reminded of that fact, but today I found something that really drives that point home.
Gather ‘round, everybody, it’s story time!
While working on a slow query ticket, I perused the code, finding several causes, and decided to run git blame on the files to see what dummy authored the mental diarrhea currently befouling my screen. As it turns out, the entire feature was written by mister legendary Apple golden boy “Finder’s Keeper” dev himself.
To give you the full scope of this mess, let me start at the frontend and work my way backward.
He wrote a javascript method that tracks whatever row was/is under the mouse in a table and dynamically removes/adds a “.row_selected” class on it. At least the js uses events (jQuery…) instead of a `setTimeout()` so it could be worse. But still, has he never heard of :hover? The function literally does nothing else, and the `selectedRow` var he stores the element reference in isn’t used elsewhere.
This function allows the user to better see the rows in the API Calls table, for which there is a also search feature — the very thing I’m tasked with fixing.
It’s worth noting that above the search feature are two inputs for a date range, with some helpful links like “last week” and “last month” … and “All”. It’s also worth noting that this table is for displaying search results of all the API requests and their responses for a given merchant… this table is enormous.
This search field for this table queries the backend on every character the user types. There’s no debouncing, no submit event, etc., so it triggers on every keystroke. The actual request runs through a layer of abstraction to parse out and log the user-entered date range, figure out where the request came from, and to map out some column names or add additional ones. It also does some hard to follow (and amazingly not injectable) orm condition building. It’s a mess of functional ugly.
The important columns in the table this query ultimately searches are not indexed, despite it only looking for “create_order” records — the largest of twenty-some types in the table. It also uses partial text matching (again: on. every. single. keystroke.) across two varchar(255)s that only ever hold <16 chars — and of which users only ever care about one at a time. After all of this, it filters the results based on some uncommented regexes, and worst of all: instead of fetching only one page’s worth of results like you’d expect, it fetches all of them at once and then discards what isn’t included by the paginator. So not only is this a guaranteed full table scan with partial text matching for every query (over millions to hundreds of millions of records), it’s that same full table scan for every single keystroke while the user types, and all but 25 records (user-selectable) get discarded — and then requeried when the user looks at the next page of results.
What the bloody fucking hell? I’d swear this idiot is an intern, but his code does (amazingly) actually work.
No wonder this search field nearly crashed one of the servers when someone actually tried using it.
Asdfajsdfk.21 -
---- Startup RantLife ----
A senior developer joined the team, let's name him Bob, and this guy is really good no doubts about that.
He made suggestions, some improvements, but Bob is always waving his hands and says out loud that some part of the code base is really really bad.
I kept quiet until one day I had to pair with Bob to check a feature. Guess what happened, as usual, Bob clenched his fist and start pointing that this code is super ugly.
So let's check the history of changes and boom, Bob was the main writer.
That moment, I was completely silent, trying not to smile as Bob came up with an excuse, he never admits that he is wrong, now he needs a scapegoat and he starts blaming the process, the planning...
I believe that being humble and saying sorry is a quality that it requires time to develop.
So don't be like Bob, please :)12 -
Last teacher rant from me and this one is about: my mentor.
Let's call him Bob.
He was a person who'd always be ready to help you out, did some lessons on bullying and the effects of it, stood by me many times when I'd have hard times with something I'd trouble and one of the most important things, he had a very good sense of humor!
Also, since I always wore a suit (still do), he introduced 'FaF' day, aka, Fancy as Fuck day. Every Wednesday the guys who wanted to would come in suits.
Yup, he got me through loads of stuff, miss that guy :)7 -
(The PM is pretty technical)
One day:
Me: Could you create this subdomain?
PM: Sure, just a sec.
Me: Ohh and could you add a letsencrypt cert? (one click thingy)
PM: Why would you need that on this kinda site...
Me: Well in general for security...
PM: Nahh.
*walks away*
Next day:
(referring to my internship manager/guider as Bob)
Bob: Hey... we have a new subdomain!
Me: Yup!
Bob: Wait why is there no letsencrypt certificate installed...?!?
Me: Well, the PM didn't find that neccesary...
Bob: (Oo) of course it is... are we going for security by default or what?
Me: Yup agreed.
Bob: *creates cert and sets everything up in under a minute*
It wasn't a high profile site (tiny side project) but why not add SSL when you can for free?8 -
Hilariously cool error.
I mean, not everyday your editor tells you to meditate or sing you a bob Dylan’s song, right?
That’s a nice touch atom. 2
2 -
I don't want to write clean code anymore :(
I read Clean Code, Clean Coder, and watched many uncle bob's videos, and I was able to apply best practices and design patterns
I created many systems that really stood the test of time...
Management was kind enough to introduce me to uncle bob clean code in the first place, letting us watch it during work hours. after like one year, my code improved 400% minimum because I am new and I needed guidance from veterans...
That said, to management I am very slow, compared to this other guy, they ask me for a feature and my answer would be like "sure, we need to update the system because it just doesn't support that right now, it is easy though it would take 2 days tops"
they ask the same thing for the other guy : "ok let me see what I can do", 1 hour later, on slack, he writes : done. he slaps bunch of if-statement and make special case that will serve the thing they asked for.
oh 'cool' they say -> but it doesn't do this -> it needs to do that -> ok there is a new bug,-> it doesn't work in build mode-> it doesn't work if you are logged in as a guest, now its perfect ! -> it doesn't work on Android -> ok it works on android but now its not perfect anymore.
and they feel like he is fast (and to be fair he is), this feature? done. ok new bugs? solved. Android compatibility ? just one day ... it looks like he is doing doing doing.
it ends up taking double the time I asked for, and that is not to mention the other system affected during this entire process, extra clean up that I have to do, even my systems that stood the test of time are now ruined and cannot be extracted to other projects. because he just slaps whatever bools and if statements he needs inside any system, uses nothing but Singleton pattern on everything. our app will never be ready-for-business, this I can swear. its very buggy. and to fix it, it needs a change in mentality, not in code.
---------------
uncle bob said : write your code the right way, and the management will see that your code generates less errors, with time, you will earn respect even though they will feel you are slow at first.
well sorry uncle, I've been doing it for a year, my image got bad, you are absolutely right, only when there is no one else allowed to drop a giant shit inside your clean code.
note: we don't really have a technical lead.
-------------------
its been only two days since my new "hack n' slash" meta, the management is already kind of "impressed" ... so I'll keep hacking and slashing until I find a better job.10 -
I've put my nose down the books regarding cryptology quite alot lately, and at the end of the day, I really think that Bob and Alice should just meet and talk in person.4
-
Resurrect happypenguin.org
This particular site appeared in the year 1998 with the goal to make gaming on Linux easier and more fun.
Unfortunately, 2013 the site went down due to lack of funding and time for the creator Bob Zimbinski. He released the database to the public but removed the code itself because it was created in the 90's and was a big security risk.
I want to resurrect happypenguin.org and I want some brave souls who want to participate with this. I am not a coder (I can only sysadmin) so It would be awesome if someone wanted to help out with this.
Would be awesome if you could make if look like the classic site, or make it very similar to it or https://distrowatch.com/ that also has a very retro style to it. It would also be great if the site was ad-free.
I will take care of the hosting part (servers, DNS, domain). 50
50 -
Bob listens to his client...
Bob do what the client asks for...
Bob is a happy developer...
Be like Bob...
.
.
.
.
Said no one!5 -
The proper use of comments is to compensate for our failure to express ourself in code.
Quote of the book "Clean Code" by "Uncle Bob".
#ShotsFired6 -
So, as the lead UX/UI designer, I was working with the marketing officer on the new e-mail template of the company. It took us at least one week to get a good settle – 'cause, you know, she's so skilled on that – doing back and forth and arguing on every detail.
Then she sent me a PPT file with the content and wording for each kind of e-mail.
After 3 days of work, I finished implementing the template and pushed the project in production.
~3 months later
MO: How's your work going on the template?
Me: Erm, sorry? You mean, the e-mails?
MO: Yes! Can you show me the result?
Me: Well, the result is online for...like...3 months?
*Surprised* MO: Hum, yeah? But I didn't validate it!
*Wince* Me: Well, yes, you did, we worked together on it and we finally found a nice settle.
MO: Yes, but the content? Can you send me one of each kind so I can double-check?
Me: ...
*to the rescue* CEO (and husband of MO): It's OK, I've already validate them.
MO: Oh, ok. But I want to double-check. I'll do it later, ok.
~3 weeks later
MO: Can you tell me how I can receive the registration e-mail?
Me: ...
*to the rescue, joking* CTO: Well, did you try to turn your computer off and on again?
MO: Oh, you really think this will work? Let me save my work first!
Me: *BOOOOM*
TL;DR: The marketing officer of my company does nothing productive and is making the company losing a lot of money, but she also make me lose my time for bullshits.
At least I can laugh about it on devRant.2 -
What is it with clients who have never even seen a single line of code in their entire lives telling me how long they believe a certain change request should take to code.
I mean, what if I told you that your "seemingly simple enough" change needed an update to 36 class files, 9 oracle stored procedures AND several database schema changes. Also, who the fuck is going to perform a regression test to make sure I didn't break anything? Your Uncle Bob??6 -
Code review:
- Almond: This method here is a mix of convoluted loops conditionals and ternaries... I really don't think we can pass this. Can we make sure this logic is a lot clearer?
- Bob: Oh, ok, sure. I'll work on that.
Next day:
- Bob: I've hopefully cleared up the meaning of that code now.
- Almond: Sure, let me look. Err... it looks the same to me? Have you done it in another branch?
- Bob: Oh no, it is the same, but there's a link in the code now to a PNG of a flowchart I put together in draw.io to show how it works.
...🤦♂️14 -
This is my most ridiculous meeting in my long career. The crazy thing is I have witnessed this scenario play out many times during my career. Sometimes it sits in waiting for a few years but then BOOM there it is again and again. In each case the person that fell into the insidious trap was smart and savvy but somehow it just happened. The outcomes were really embarrassing and in some cases career damaging. Other times, it was sort of humorous. I could see this happening to me and I never want it to happen to you.
Once upon a time in a land not so far away there was a Kickoff Meeting for an offsite work area recovery exercise being planned for our Oklahoma locations. Eleven Oklahoma high ranking senior executives were on this webinar plus three Enterprise IT Directors (Ellen, Jim and Bob) who would support the business from the systems side throughout the exercise.
The plan was for Sam Otto, our Midwest Director of Business Continuity to host this webinar. Sam had hands-on experience recovering to our third party recovery site vendor and he always did a great job. He motivated people to attend the exercise with the coolest breakfasts and lunches you could imagine. Donuts, bagels, pizza, wings, scrumptious salads, sandwiches, beverages and desserts. He was great with people and made it a lot of fun.
At the last minute Charles 'Don't Call Me Charlie' Ego-Smith, the Global Business Continuity Senior Vice President, decided to grand-stand Sam. He demanded the reins to the webinar. Pulled a last-minute power-play and made himself the host and presenter. You have probably seen the move at some point in your career. I guess the old saying, 'be careful what you wish for' has some truth to it - read on and let me know if you devRanters agree...
So, Charlie, I mean Charles, begins hosting the session and greets all of the attendees. Hey, good so far! He starts showing some slides in the PowerPoint presentation and he fields a few questions, comments and requests from the Oklahoma executives. The usual easy to handle requests such as, 'what if we are too busy to do recover all systems', 'what if we recover all of our processes from home', 'what if we have high profile visitors that month?' Hey you can't blame them for trying. You are probably thinking to yourself, 'been there - heard that!' But luckily our experienced team had anticipated the push-back. Fortunately, Senior Management 'had our backs' and committed that all processes and systems must participate and test - so these were just softball requests, 'easy-peasy' to handle. But wait, we are just getting started!
Now the fireworks begin. Bob, one if the Enterprise IT directors started asking a bunch of questions. Well, Charles had somewhat of a history with Bob from previous exercises and did not take kindly to Bob's string of questions. Charles started getting defensive and while Bob was speaking Charles started IM'ing. He's firing off one filthy message after another to me and our teammate Sam.
'This idiot Bob is the biggest pain in the ass that I ever worked with'; 'he doesn't know shit', 'he never shuts the f up', 'I wanna go over to his office and kick his f'in ass...!'
Unfortunately...the idiot Charles had control of the webinar and was sharing his screen so every message he sent was seen by all of the attendees! Yeah, everyone including Bob and the Senior Oklahoma executives! We could not instant message him to stop as everyone would have seen our warnings, so we tried to call Charles' cell phone and text him but he did not pick up. He just kept firing ridiculously embarrassing dirty IM messages and I guess we were all so stunned we just sat there bewildered. We finally bit the bullet and IM'ed him to STOP ALREADY!!! Whoa, talk about an embarrassing silence!
I really felt sorry for Bob. He is a good guy. Deservedly, Charlie 'Yes I am going to call you CHARLIE' got in big time hot water after the webinar with upper management. For one reason or another he only lasted another year or so at our company. Maybe this event played a part in his demise.
So, the morale is, if you use IM - turn it off during a webinar if you are the host. If you must use it, be really careful what you say, who you say it to and pray nothing embarrassing or personal is sent to you for everyone to see.
Quick Update - During the past couple of months I participated on many webinars with enterprise software vendors trying to sell me expensive solutions. Most of the vendors had their IM going while doing webinars and training. Some very embarrassing things came flying across our screens. You learn a lot reading those messages when they pop-up on the presenters' screen, both personal and business related. Some even complaints from customers!
My advice to employees and vendors is to sign-out of IM before hosting a webinar. Otherwise, it just might destroy your credibility and possibly your career.5 -
GODADDY IS THE BANE OF MY FUCKING EXISTANCE
I WOULD LIKE TO MEET THAT GUY BOB PARSONS SO I CAN STAB THAT FUCKER IN THE GOD DAMMED BALLSACK15 -
Me: i have to pass this test tomorrow so I better study
Me to me: start an overambitious project that will take years to complete3 -
For a week+ I've been listening to a senior dev ("Bob") continually make fun of another not-quite-a-senior dev ("Tom") over a performance bug in his code. "If he did it right the first time...", "Tom refuses to write tests...that's his problem", "I would have wrote the code correctly ..." all kinds of passive-aggressive put downs. Bob then brags how without him helping Tom, the application would have been a failure (really building himself up).
Bob is out of town and Tom asked me a question about logging performance data in his code. I look and see Bob has done nothing..nothing at all to help Tom. Tom wrote his own JSON and XML parser (data is coming from two different sources) and all kinds of IO stream plumbing code.
I use Visual Studio's feature create classes from JSON/XML, used the XML Serialzier and Newtonsoft.Json to handling the conversion plumbing.
With several hundred of lines gone (down to one line each for the XML/JSON-> object), I wrote unit tests around the business transaction, integration test for the service and database access. Maybe couple of hours worth of work.
I'm 100% sure Bob knew Tom was going in a bad direction (maybe even pushing him that direction), just to swoop in and "save the day" in front of Tom's manager at some future point in time.
This morning's standup ..
Boss: "You're helping Tom since Bob is on vacation? What are you helping with?"
Me: "I refactored the JSON and XML data access, wrote initial unit and integration tests. Tom will have to verify, but I believe any performance problem will now be isolated to the database integration. The problem Bob was talking about on Monday is gone. I thought spending time helping Tom was better than making fun of him."
<couple seconds of silence>
Boss:"Yea...want to let you know, I really, really appreciate that."
Bob, put people first, everyone wins.11 -
Best non-technical description of why we hate to post in forums (shamelessly copied from Shamus Youngs blog found here: http://shamusyoung.com/twentysidedt...) ->
ALLEN: Hi, I’m new to driving and I need to move my car back around 5 meters. How can I move the car backwards?
(2 days later.)
ALLEN: Hello? This is still a problem. I’m sure someone knows how to do this.
BOB: I can’t believe you didn’t figure this out yourself. Just take your foot off the gas and let the car roll backwards down the hill. Tap the bake when you get to where you want to be. Boom. Done.
ALLEN: But I’m not on a hill. I’m in my driveway and it’s completely flat.
CARL: Dude, I don’t know what you’re trying to accomplish, but you should never be driving backwards. It’s dangerous and will confuse the other drivers. See the big window in FRONT of you? That’s your first clue. Don’t drive backwards.
ALLEN: I’m not trying to drive backwards. I just need to move back a little bit so I can get out of my driveway and start driving forwards.
CARL: So just drive in circle until you’re pointed the right way.
ALLEN: I don’t have enough room to turn around like that. I only need to move back a few meters. I don’t understand why this has to be so hard.
CARL: Sounds like your “driveway” isn’t compatible with cars. It’s probably made for bikes. Call a contractor and have them convert some of your yard into driveway to be standards-compliant with the turning radius of a car. Either way, you’re doing something wrong.
DAVE: I see your problem. You can adjust your car to move backwards by using the shifter. It’s a stick located right between the passenger and driver seats. Apply the clutch and move the stick to the “R” position.
ALLEN: But.. I don’t have a clutch. And there isn’t a stick between the seats.
CARL: Sounds like you’re trying to drive in Europe or something.
ALLEN: Ah. Nevermind. I figured it out.8 -
Conversation between me (intern) and a guy from communications, let's call him Bob.
Bob: "Hey, client X wants these pages to be changed."
Me: "Again? Last time I changed them was less than a week ago!"
Bob: "Yeah, everyone thinks X is a pain in the ass, but hey, more money for us."
Me: "But you don't pay me..."
Bob: "Oh yeah, you're right haha XD."
Me: "Haha... :')"2 -
Does anyone know if there's a Bob Ross of development?
I feel like I just need to hear someone coding or talking best practices in a chilled out relaxing way to help me through the day.16 -
An application based on a single MySQL stored procedure that contained all the application business logic inside of it (plus a poor webapp that simply called it). The stored procedure had 97 (yes, NINETY SEVEN) parameters... and about half of them were boolean flag used for enabling/disabling another parameter. I think that Uncle Bob could follow you holding an AK-47 if he saw that. The saddest part is that the shit was written by a guy having a PhD in computer science, and he knew that was bad, but the boss asked him to do it in that way. The guy left the company before I joined it and I had to maintain that crap. Guys, the first time I saw it I thought that should be a joke. Code generated by decompilers was easier to read, maybe even Brainfuck. I tried complaining with the boss but she said that the system was wonderful and very efficient. This was one of the reasons I moved to another company after some months.3
-
Found this on mastodon:
I sometimes imagine that somewhere there must be a Ministry for Messing Up the Internet. It would be like a Monty Python sketch.
Each day a new idea would arrive in the intray of an official who looks like a young John Cleese. They would form a large pile of papers.
[reads] "Make a protocol so complicated that nobody can understand it. No the Sematic Web has already been tried".
[reads] "Ban all the cat photos for spurious copyright reasons. No, we already have an upload filter in progress to do that".
[reads] "Fill Tim Berners-Lee's socks with elephants. No - much too silly."
"Ah yes, [reads] make a giant man in the middle that everything on the internet has to go through like a sausage machine and get squirted out on the other side, hopefully in the correct order. Bernard, get Cloudflare on the phone immediately."
@bob@soc.freedombone.net2 -
!dev
lol I keep getting in trouble over people taking secondhand-offense, and managers keep bringing up the same instances like I’m somehow at fault.
Look, if Alice says something to Bob, and Carol hears it and gets offended on Bob’s behalf, but Bob doesn’t? Carol should jump off a bridge.10 -
Story time:
Ok so I'm in school and I'm on the computers we have to do a project on them the with rest of the class and I'm sitting beside this guy let's call him Bob (not his real name) anyways so Bob is working away on his computer and I'm trying to move documents and i decided to use cmd for it so opened it and then bob saw the cmd window and yelled "TEACHER HE'S TRYING TO HACK THE SCHOOL" then my teacher came over who has no idea how to operate computer like the rest of the class im surprised they can even turn the computer on anyways my teacher comes over and yells "PRINCIPALS OFFICE RIGHT NOW" and I'm like WTF?! anyways I have to explain to the principal what I was doing but she didn't understand so I go detention that day. Thanks a lot BOB!10 -
I had a co worker who was a bit of a robot with little to none tact or social skills (let's call him Bob Bot). Once, we had one of those company events where pointy haired boss had the cringe worthy idea of having everyone share an "unusual secret" about themselves as a team building exercise.
"So Bob Bot, what is your secret?"
Bob (in the same tone you would use to deliver the weather forecast): "So for those who don't know yet, I am polyamorous. This means that I have multiple sex partners at the same time."
(Dead silence in the room)
Bob: "Oh but wait...she gets to have multiple sex partners as well!"
And that kids, was a great example of gender equality! -
I hate people who think that building software is all about one click away and generating things. I got told to complete the task faster than the speed of light.
Fancy me some rant time? Let's name that cunt, "Bob".
"
Hey Bob, I got questions for you. Are you sure you were in your mum's womb for 8-9 months? Are you the kind of twat who honk at people as soon as the traffic light's turning green?
Building software takes time, the CI/CD takes time, TestFlight takes time, approvals from the Google Play store take time, approvals from Apple App Store connect take time, Unit testing takes time and every fucking thing you can name takes time!
It's just like sex, nobody wants to be with someone who can only last in bed for 0.000000000001 nanoseconds, the longer, the better, (but not too long).
It is also like building houses, which takes months to build not hours. As from my experience so far, something tells me that you are not the kind of person who would understand how to build a house but a sand castle which takes only hours to build.
Relentlessly, you bombarded me with a pile of bollocks and a pile of nonsense is not going to fasten up the compilation of the software.
"4 -
#include <rant>
So, in my class I have this one dude who also code, "Awesome" I thought when I first saw that he codes, he codes in c# and claims to know JavaScript.
So I hung out with him a bit on recess/break time, and I eventually found out that he is a d*ckhead
First of all, he claims that he can code ANYTHING, I mean triple A games, the machine that can find pi in 10 seconds. And I know that this isn't true, because he "can't bother" with showing me it.. whatever I think.
I also mentioned that he is a d*ck, why am i saying that? Because if you make an error he would just go, "there is supposed to be *insert random bullshit here* instead of *a typo that I made*, retard. You are honestly fucking stupid" Listen, I love when people point errors out, it really helps. But when you say it like that, it honestly makes me sad. One day, I was messing around with classes in python and he went "hey idiot! That's wrong! There is supposed to be a *random word* instead of *working code*". The funny thing is, HE DOESNT KNOW WHAT PYTHON IS. So I comment out the working code and puts in his c# bs there instead. And he just says, "it isn't working because there's a private class instead of a public class. Ehmm, excuse me? This is python, ok.
Oh and he told me I was a retard because I can't develop triple a games using pure JavaScript.
Any tips on dealing with the guy?23 -
!Rant
*Whenever there's a big hacking thing that happened in cyberspace and the media gets the footage*
"Hey! You! you the website developer. Can you like get a hoodie and smash the keyboard."
"Why?"
"Big virus leak"
"But that's not ha.."
"SHUT THE FUCK UP AND GET THE HOODIE ALREADY"5 -
Just made a 10-minutes change on the website for a client for free while the company originally in charge of her website development wanted to charge her 660€. For a simple <script> tag.6
-
Oh F***, not again!
Bob, every single time you "patch" the servers I run into issues, that you cannot fix.
Bob: "heuuu... I don't know anything about python or npm or any of that"
Then stop touching it!!!1 -
Bob Tabor.
He is one of my favourite tutors. Fell in love with C# after starting with his videos. 14
14 -
The year was 2021 and we have to implement X
Alice, the manager: let's do this and this
Me: actually that won't scale, I did the same in my previous company. Here's an analysis on why it doesn't scale
Alice: nope, we'll have to do it like that. If it doesn't scale we'll fix it. It's a learning opportunity.
The feature was rolled out, and we got tons of alerts after 1 week.
Alice: haha what a ride! At least the team learned something new
Me: I didn't learn anything new. All I got was stress and disrupted sleep because of those midnight incidents...
Then 2022 came, Alice was promoted thanks to the incredible leadership to deliver X, I joined a different project, a part of this project is to implement Y, similar to X.
Bob, the manager: let's do this and this
Me: actually that won't scale, I did the same in my previous project. Here's an analysis on why it doesn't scale, you can ask Alice if you want.
Bob: nope, we'll have to do it like that. If it doesn't scale we'll fix it. It's a learning opportunity.
The feature was rolled out, and we got tons of alerts after 1 week.
Bob: haha what a ride! At least the team learned something new
Me: I didn't learn anything new. All I got was stress and disrupted sleep because of those midnight incidents...
It's 2023 now, Bob got promoted thanks to the awesome leadership to roll out Y, I joined another project, which requires us to develop Z, similar to X and Y.
Chris, the manager: let's do this and this
Me: ah shit here we go again...4 -
u/bob
"hey can someone help me assign 10 to a variable in rust"
u/1337rustpro
"Well first of all little shithead that is not rust-like we dont do that in rust here is how godfather mozilla intended it first you create a register in your ram then you download these 9 packages that are not in std for some reason then you box your integer 78 times then you sacrifice a goat that the rust compiler doesnt give you random advice that doesnt work then you pee on your motherboard and commit 53 times to open source repos on github bitbucket and svn then you will maybe probably have 7 assigned to your variable"
u/bob
"Oh wow rust sure is overly complicated"
u/bob
<User banned>4 -
Uncle Bob says:
Software Craftsmanship is not about glory and rockstar status. It’s not about being the overtime hero, or the last minute cowboy. Rather it is about discipline, professionalism, and the desire to constantly improve.3 -
Why do people have to lie? I am seriously getting tired of it.
Context: While I was on vacation the company hired some guy we’ll call Bob.
Bob is a senior with 10+ years of experience. 5 of those years in React (supposedly).
I got back from vacation and was told I’d be working on a project with Bob.
I’ve worked in teams before so I thought no problem.
Now I am aware that different people have different styles, so that’s why we agreed on a lint config with some fancy git hooks.
I was excited at first because the project actually seems nice, but my excitement soon turned into terror.
First of all, Bob doesn’t seem to understand Git…fair enough, I’ll give him a quick guide…
Mf calls me at 11pm on a Friday because he can’t push because the tests are failling.
Now tests. Bob doesn’t write those. Great.
We had created a few components to use throughout the project.
Bob seems to consistently forget what components are and why you write them and just imports the defaults from the UI library we’re using.
Bob also has a kink for hardcoding values for some reason.
I talked to Bob multiple times about this and he just tells me he’ll change it but in the end the PR stays open for 5 days, before it’s actually me who goes in and fixes it. Oh and yeah this shit keeps happening over and over again.
Now I know some of us devs hate meetings but for the love of God Bob just show up. You don’t even have to speak. Or at least answer a message that corresponds to the working hours and not in the middle of the night.
I am getting tired of this behavior and am seriously holding back from reporting this to the management. It’s been a month and I am seriously worried about the project. I have my own stuff to do but it takes time for me to clean up his absolute mess that doesn’t even pass the CI.
Call me an asshole I don’t care. It’s been a month and I’m legit worried about the future of the project.17 -
Most ridiculous meeting I've been in? Sooo many. Here is the first.
Mandatory box knife safety meeting. Why? We worked in the same building as the warehouse, and the safety manager made it mandatory everyone in the building be trained.
We walk into the meeting...
Trainer: "What are you guys doing here? You're developers."
Bob: "Adam said this meeting is mandatory for everyone."
Trainer: "Yea, but not you guys. You'll never touch a box knife. Just a sec, let me run out and find Adam."
<2 minutes later>
Trainer: "Sorry guys, Adam is not budging. He said everyone and that includes developers."6 -
User logins testing:
How others name their imaginary users:
Admin
John
Jane
Bob
How I name my imaginary users:
Root (admin)
Alice
Floyd4 -
Uncle Bob and Martin Fowler. Their books (“Clean code”, “Clean architecture”, “Refactoring”) and Twitter posts have changed the way I look at software development.5
-
Bob Martin. His books Clean Code and the Clean Coder, and all his talks on architecture, SOLID and TDD. I could listen to him talk for days, and he taught me everything i know about writing clean code.2
-
A typo today has rendered me the joke of the office... 😂
Almond's PR: "Added missing unit testes to classes Foo and Bar"
----
Bob: "LGTM. Bet that took some balls."
Craig: "LGTM. Missing unit testes drive me nuts."
Ian: "LGTM. Write your testes with your code guys, a bit bollocks to have to add them afterwards." -
Manager: "Hi Almond, how is X going?"
Almond: "...I don't know, Bob is in charge of that."
Manager: "Ok. Do you know the status of Y at all?"
Almond: "Not sure, isn't that Bob's responsibility too?"
Manager: "Well, yeah, but I never seem to be able to get a good answer out of him. Find out on both fronts and let me know ASAP please"
...sure, I know how this goes. I'll stop all the dev work I'm doing, do your job for you, talk to the lazy bonehead that never bothers doing anything, report back that he's done sod all (or still "in a requirements gathering phase" as he puts it), be asked "why is he taking so long", have a bit more back and forth, then decide we'll just leave him be as actually trying to get him to do any work is going to be too much like hassle 😒6 -
Even if interdimensional monsters are looking for you... never forget to naming your variables!
#Bob 4
4 -
Don't you hate it when your co-worker does dumb things, but thinks it's the "clean code" way?
The following is a conversation between me and a co-worker, who thinks he's superior to everyone because he thinks he's the only one who read the Clean Code series. Let's call him Bill.
Me: I think the feature we need is quite simple, our application needs to call this third party API, parse the response and pass it to the next step. Why do you need to bury everything under an abstraction of 4 layers?
Bill: bEcAuSe It'S dEcOuPlInG, aNd MaKe ThE cOdE tEsTaBlE
Me: I don't know man, you only need to abstract the third party api client, and then mock it if you want. Some interfaces you define makes no sense at all. For example, this interface only has 1 concrete implementation, and I don't think it will ever have another. Besides, the concrete implementation only gets the input from the upper layer and passes it down the lower layer. Why the extra step? I feel like you're using interface just for the sake of interface.
Bill: PrOgRaMmInG tO iNtErFaCe, NoT cOnCrEtE iPlEmEnTaTiOn!!!
Me: You keep saying those words, I don't think they mean what you think they mean. But they certainly do not mean that every method argument must be an interface
Bill: BuT uNcLe BoB blah blah blah...
Me: *gives up all hope*14 -
I'm the only developer in my company. I am a "junior dev" who started working like 6 months ago. Safe to say I am not well experienced and have a lot to learn in this journey. Due to this pandemic, my bosses who have been flaunting their wealth have started making losses and now needs to find another way to get money. Mind you, the company I work with is a marketing firm.
So what the bosses thought of doing was creating a delivery service due to the current situation. It is not their field but since they still need to show people they are the rich people, they need money either way. Since I'm the only developer in the company I've to make this application. I've to make an Android and iOS app with a back-end and an admin portal all in 1 month. My pay is shit and by shit I mean less than even 700 USD. I've not done a project like this before so there would be a learning curve as well. And there is no one to guide me either.
They think just because they have hired one developer anything development related is settled and I will do everything no matter how big or complicated or how shitty my salary is.
The feature list is a whole system, like it is so complicated that someone could really make their own company just to work on that application. It's HUGE.
I'm thinking of saying no I can't do this shit. But just wanted to see what some more experienced devs say about this. I've attached the features list in the rant. 39
39 -
Me and my friend (let's call him Tom) have done tons of projects before and got some decent knowledge, but we got a dude (Bob) working with us on that final project of Uni and he doesn't know what Git is nor what frameworks are so we chose CodeIgniter ONLY to make it easy for him.
2 month after starting the project and getting like half of the work done (mainly me and Tom) Bob 'kind of' learned PHP, CodeIgniter and Git so he wanted to contribute because the project manager will review all the commits done weekly.
So Bob did some HTML (what now?) and wanted to push it on the repo and even using Gitkraken as opposed to the Git CLI he managed to merge two f*** branches, and when he doesn't mess up the repo he totally ignores the files' structure of the project and makes his own thing.
Worst thing is, when Tom tries (I gave up a long time ago) to teach him something or to give him advice he's all like "Oh okay" "Yeah" "Got it!" but he doesn't understand anything and he won't admit it ! It's like talking to a wall...2 -
I manage a team of engineers.
Toxic Culture Post #2:
Manager: Everybody on your team needs their own swimlane in Jira. Each person's work should be their own lane. When I have a ticket for <Project A> I want to make sure that <Bob> always gets it, all tickets for <Project B> must go to <James>. You'll need to figure out which team member will handle <New Project C> and create their personal swim lane.
Me: That's not really how SCRUM works. Actually, that's not how teamwork works. You're creating silos and we all need to learn how to do these tasks. We're a cross-functional team, and each team member brings their own unique talents to the whole process.
Manager: So you'll create the swimlanes?
Me: No
Manager (to Bob): You'll be devoted to <Project A> from now own. It's the only work I expect you to do. All work for that project will be yours.
Likewise, my manager also reached out to each team member and assigned them specific tasks, furthering the silos.6 -
So, stranger things season 2, Bob is hacking a system with BASIC, writing entire lines with one keyboard press. Such skill. Much wow.
Have I missed something lately? xD10 -
I'm so fucking tired of OOP.
This bullshit never ends. Everyone treats OOP in their own, proper (of course) way. You read tons of those fashion books, like uncle bob and shit. and then comes a dumb asshole that starts reviewing your code, and tells you doing it wrong. FUCK. and you can't tell anything to your TL or PM cuz they are same dumb asholes. Because after you fix all the bullshit from the first asshole, those more responsible assholes come and tell you that you still doing it wrong.
- uh.. bruh, why don't you make interface for everything? that' S.O.L.I.D, you know.. it just right thing.
- bruh, why don't you use enum and switch case. we need a factory.
- bruh, we don't use abstract classes, use interface
- could you rewrite your linq/stream thing into a class and a method. it's just simpler for us. foreach loop is something everyone knows.
well,then go and LEARN the tool you're dealing with, coderfucker.
FUUUUCK.13 -
Am I the only one who when they are super focused writing code and debugging starts acting like Bob Ross painting a picture?(without a filter... of course)
And here we’ll add another little god damn breakpoint so we can watch our fucked up variables report the wrong thing..
Oh and over here will just add another little happy simple if statement.
Oh look at the happy if statements in a row.. maybe we’ll add little switch statement here.6 -
When i started ocaml. Now most languages use
import lib;
But not ocaml. No, it uses
open lib;
So i had the genius idea of writing my own lib and submitting my program as
open Bob;
let () =
show "vegana";;3 -
If you're good at the debugger it means you spent a lot of time debugging. I don't want you to be good at the debugger.
- Uncle Bob2 -
!dev
There’s nothing more frustrating than feeling depressed and apathetic toward everything for days, like the walls are closing in, you’re never going to achieve your goals, and there’s no point to living... only to realize it’s just that it’s “that time of the month”.
I miss the days when my PMS was literally just “Random commercials make me cry”.
To clarify, I would probably catch on that these emotions are just a hormonal reaction if “that time of the month” happened every month. Nexplanon is a weird birth control.
I’m sure this thread was overshare, but I just wanted to express my frustration.
Here’s Bob being stealth 5
5 -
Time to time I do some Hard- and Software repairs for neighbors and get some little money for it.
My neighbor let's call this one "Bob".
Bob has a new printer and a old one which is over 15 years old.
First: Holy shit 15 years old printer works still. WTF? Is this thing Hulk or what?
He ask me why he can't print a 128 site Doc with pictures in it from the old printer. It always stop at around 50 pages.
I tell him that it has only 32 MB Ram/Flash and can't print more. Before the Doc's were much smaller and could print that, but today you got files with more than 10 MB and on a printer it need's atleast 128 MB Ram to process and print it.
Guess what? One week later he asks me the same questions.
Why don't you print it on your new shiny expensive printer and why do you need still that OFFICE WAR VETERAN OF PRINTER to print it???
Seriously just use the new and better one!! Bob please give that old one a burial. He deservs it!5 -
Realized I hadn’t subjected you guys to cat photos.
The brown cat is Robert Lazarus (the rescue named him Bob) and the white and brown cat is Dylan Thomas (rescue named him Dylan).
Bobcat died as a kitten (thus his middle name) and was brought back to life, but was blind for a bit as a result. According to legend, Tomcat acted as his seeing eye cat when he wasn’t able to see on his own. Bobcat’s vision’s better now (though he still might have some issues as he’s a little iffy on balance sometimes), but the rescue didn’t want to separate the two of them since they were a bonded pair.
Loads of people wanted Tomcat but didn’t want to take a chance on a zombie cat. Which I’m constantly thankful for because they’re awesome. Even if they steal my keyboard and try to eat my notes and try (and succeed) to jump on me while I’m trying to cook because they want to play with the feather toy that’s been hidden (not so well!) on top of the fridge and know it’s their best shot at getting up there. 8
8 -
While reviewing a PR from one of our newer FE devs, I ended up spending more time than I would like mulling over its composition. The work was acceptable for the most part; the code worked. The part that got me was the heavy usage of options objects.
When encountering the options object pattern (or anti-pattern, at times) in complex scenarios, I have to resist the urge to stop whatever I'm doing and convert it to the builder pattern/smack them in the head with a software design manual. As much as I would like to, code janitor is one of the least valuable activities I engage in daily, and consistently telling someone to go back to the drawing board for work that is functional, but not excellent is a great way to kill morale. Usually, I'll add a note on the PR, approve it, add a brown bag or two on that sort of thing, and make attendance mandatory for repeat slackers. Skills building and catharsis all rolled up in a tiny ball of investing in your people.
Builders make things so much cleaner; they inform users what actions are available in a context; they tend to be immutable, and when done well, provide an intuitive fluent interface for configuration that removes the guesswork. As a bonus, they're naturally compositional, so you can pass it around and accumulate data and only execute the heavy lifting bits when you need to. As a bonus, with typescript, the boilerplate is generally reduced as well, even without any code generation. And they're not just a dumping ground for whatever shit someone was too lazy to figure out how to integrate into the API neatly.
They're more work in js-land, sure; you can't annotate @builder like with Lombok, but they're generally not all that much work and friendlier to use. 9
9 -
"The only way to make the deadline - the only way to go fast - is to keep the code as clean as possible at all times."
Uncle Bob
Spread the word.1 -
I'm in 3rd year of my CS degree....
Fucking Indian Education System
I'm having a subject css(cryptography & system security)... The bitch who teaches us doesn't know shit.... She just picks random words from the ppt & blabber random bullshit...
Last week we had our unit tests...and the question was explain Working of deffie-helman. Just because I didn't use the names Alice & Bob in the example she didn't gave me marks....I mean wtf..that was just an example mentioned in the slides.....
I bet it wasn't required at all...
I knew most of the things they teach here..
These mofo professors have just a CS degree and they are here to teach the same course....10 -
Want maximum efficiency in python?
def say(text):
print(text)
You save 2 keypresses everytime you print13 -
[...] we should never ignore any part of code. The parts we ignore are where the bugs will hide.
- Uncle Bob1 -
Startup rant ---
John and Bob joined a startup at the same day but they were in two different offices.
John joined the US office while Bob joined the European office (let's not share the country here ;) )
Both of them worked really hard, they worked longer hours, showed result and helped the startup to reach and get Serie A funds.
That seems good no? But let's step back, John was promoted twice and get more perks while Bob got only a salary raise that aligned him with the current market.
There are different reasons for this but the most important one is that the company is having two different cultures for the two offices.
What's funny here is that Bob effort is well known across the two offices and his contribution has made a huge difference to the company but unfortunately he wasn't rewarded for it.
So Bob opened a new window not in his office but in his browser to find better opportunities.2 -
Meet today.... Fetlang
---
lick Bob's cock
lick Duke's left nipple one million times
while Ada is submissive to Duke
make slave scream Ada's name
Have Charlie spank himself
Have Ada lick his tight little ass
Have Bob lick Charlie's tight little ass, as well
make Ada moan Bob's name
make Bob moan Charlie's name
---
Never felt so dirty after calculating the fibonacci sequence...
https://github.com/Property404/...
"Fetlang is a statically typed, procedural, esoteric programming language and reference implementation. It is designed such that source code looks like poorly written fetish erotica."8 -
So someone decides that the employees need to do these stupid Web-based training's that not even high school kids should be looking into.
What is about ?
Security and Cryptography, and now event the real stuff.
What it covers?
Alice and Bob, Bob and Alice.
Alice wants Bob some pics/messages that she suspects someone else will see. DDDDDDAAAAAAAFFFFFFFAAAAAAAAAKKKKKK
A total of 7 useless time wasting interactive and annoying training's, 20+ min each.
But someone forgot that please do not send this shit to engineers of your company, specially Software/Network engineers. Oh another subset, specially not to those who work deeper into the domain.
I'm getting paid to do this time wasting activity, and still.
I also may come back and remove this BUT FOR NOW I NEED TO RANT. -
rant & question
Last year I had to collaborate to a project written by an old man; let's call him Bob. Bob started working in the punch cards era, he worked as a sysadmin for ages and now he is being "recycled" as a web developer. He will retire in 2 years.
The boss (that is not a programmer) loves Bob and trusts him on everything he says.
Here my problems with Bob and his code:
- he refuses learning git (or any other kind of version control system);
- he knows only procedural PHP (not OO);
- he mixes the presentation layer with business logic;
- he writes layout using tables;
- he uses deprecated HTML tags;
- he uses a random indentation;
- most of the code is vulnerable to SQL injection;
- and, of course, there are no tests.
- Ah, yes, he develops directly on the server, through a SSH connection, using vi without syntax highlighting.
In the beginning I tried to be nice, pointing out just the vulnerabilities and insisting on using git, but he ignored all my suggestions.
So, since I would have managed the production server, I decided to cheat: I completely rewrote the whole application, keeping the same UI, and I said the boss that I created a little fork in order to adapt the code to our infrastructure. He doesn't imagine that the 95% of the code is completely different from the original.
Now it's time to do some changes and another colleague is helping. She noticed what I did and said that I've been disrespectful in throwing away the old man clusterfuck, because in any case the code was working. Moreover he will retire in 2 years and I shouldn't force him to learn new things [tbh, he missed at least last 15 years of web development].
What would you have done in my place?10 -
Most upsetting interview rejection?
Back when I graduated college, I did the usual rounds of interviews with insurance companies, banks, various other institutional businesses set up by the college's career center.
One local insurance company interview I thought went great. Usual 'Where do you see yourself in 5 years?' type questions, told her about my job history, very high level type stuff.
Couple of weeks later I get a letter in the mail and after the usual 'It was great to meet you blah blah blah', it ended with
'State Farm will never consider you for a position with our company.'
Never?! My then fiance (now wife) yelled "WHAT DID YOU DO?!!!" and I racked my brain for anything I might have said or done. The HR lady was attractive, but I didn't stare at any body parts and I didn't make any weird sexual advances (I was nervous enough without *that* going thru my mind).
The college career center floods the local companies with graduates and I was #5 in the waiting room that day. My only guess was they got me confused with someone else.
My fiance wanted me to call them immediately to straighten out any misunderstanding, but I knew what was done, was done. It's not like they would realize "Oh, that's right, it was Bob that kept looking at Karen's breasts, not you...come work for us!" Besides, why would I want to work someplace that didn't know/care who I was?5 -
My husband has always asserted that it is my cat who is the sole instigator in attack grooming sessions, and he may well have been right. But this night, my cat was sleeping peacefully on me as I peacefully slept when his cat decided to go on the offensive.
At 3:30 am.
I appreciate your growth as a cat, Bob, but I would have appreciated it more had you not awoken me with your new-found confidence.1 -
<rant>
I really don't enjoy visual studio
Is not bad but it's not worth the disk space it takes up..
Also, if your disk is starting to fill up and vs is filling the most space, YOU CAN'T <swearword> UNINSTALL IT FROM YOUR PC
To remove the shit, I had to upgrade to Windows 10 (our school PC's are not allowed to have Linux) and delete my whole fucking disk, just to get it removed
Fix your shit ms
</rant>12 -
I saw this image on IBM's blog. The author was explaining how blockchain could be used to implement self sovereign identities. But, isn't the last step wrong? In order to decrypt Alice's message, Bob should use his private key instead of Alice's public key, right? Of course, while encryption Alice has to use Bob's public key.
 3
3 -
A puzzle, just for fun.
Two friends, (a)lice and (b)ob are communicating through a channel encrypted with random numbers XOR'd together, like so:
keyA = randint(1024, 1024**2)
keyB = randint(1024, 1024**2)
msg = randint(1024, 1024**2)
You, an interloper, have watched all these communications, siphoning the packets as they went.
When alice sends a message to bob's mailbox, she does it like so:
mailBoxB = keyA^msg
Bob's mailbox receives the mail automatically, and applies his own key, sending it back to alice's mailbox:
mailBoxA = keyB^mailBoxB
Next, Alice's mailbox notices the message, and automatically removes her key and sends it back to bob's mailbox. All of this, the first message, the second, and the third, happens in milliseconds, the back and forth.
mailBoxB2 = mailBoxA^keyA
Finally, bob's mailbox removes his key, and deposits the now unencrypted message in his box, for him to read in the morning:
mailBoxBFinal = mailBoxB2^keyB
As as a spy, you know the first packet sent to bob, had a value of 589505.
The packet bob sent back to alice, after applying his key, has a value of 326166
The message sent *back* to bob after alice removed *her* key, had a value of:
576941
What are the values of keyA, keyB, and what is the value of the msg?4 -
So, I'm the only developer in a marketing firm. I was asked to develop the company website. The deadline was within a month. A full on CMS. When I was interviewed I told them that I'm more fluent in back-end development rather than UI design etc. So the company's designer started designing the website. Incomplete designs were given to me one week before the due date. I'm a fresh grad so I'm relatively new. So I used a website builder knowing that I can't code the whole CMS within a week. I asked them which they gave approval to knowing it was $16 a month.
I started making it using webflow. 2 pages in, I asked them to pay for the subscription because webflow allows 2-3 pages for the free version. When the time to pay came, they were like, "wow, $16? That's a lot every month for just a website". Keep in mind, it's not that they don't have the money. Just cheap. This was like 5 days before the deadline and they said it's too expensive and asked me to code everything by myself. And gave an extension for a few months.
I said okay and started development. I said we would still need to spend on a cloud instance for deployment which would be like $6 monthly. My manager asked me is there a way to not pay monthly and pay like $100 and get one for lifetime. I facepalmed so hard. I tried explaining to him cloud-server costs are either monthly/yearly or pay-per-use basis. He told me maybe because I'm new I don't know and go to do some research on it. I researched and the only solution was to buy a server which costs $100++ monthly. I sent him the costs in a document which he did not even bother to read.
That was back in November last year. Fast forward to February. I've coded the website thrice. The design keeps changing every week. The design is still not complete. And they are saying I'm not eligible for a promotion because the website is still not done. It pisses me the fuck off. It's not my fault it's not done. The designers haven't done the design, the manager can't decide on shit. I'm just here because it's my first job out of uni and I thought it might be a good experience, but honestly right now the way they are treating me it pisses me off.6 -
Ok I fucked up.. I installed elementary OS on a USB from my school pc..
Windows still work but I have to plug in the elementaryOS USB for grub to boot so I can boot windows
Fuck me14 -
Copy and paste this in Notepad++, then select one an push F1:
BR,
Loreia
Notepad++
Martin Golding
L. Peter Deutsch
Seymour Cray
Brian Kernighan
Alan Kay
Bill Gates
Christopher Thompson
Vidiu Platon
Edward V Berard
pixadel
Oktal
Bjarne Stroustrup
Mosher's Law of Software Engineering
Bob Gray
Roberto Waltman
Gavin Russell Baker
Alanna
Linus Torvalds
Cult of vi
Church of Emacs
Steve Jobs
brotips #1001
brotips #1212
Robin Williams
Darth Vader
Doug Linder
Jean-Claude van Damme
Don Ho
Anonymous #1
Anonymous #2
Anonymous #3
Anonymous #4
Anonymous #5
Anonymous #6
Anonymous #7
Anonymous #8
Anonymous #9
Anonymous #10
Anonymous #11
Anonymous #12
Anonymous #13
Anonymous #14
Anonymous #15
Anonymous #16
Anonymous #17
Anonymous #18
Anonymous #19
Anonymous #20
Anonymous #21
Anonymous #22
Anonymous #23
Anonymous #24
Anonymous #25
Anonymous #26
Anonymous #27
Anonymous #28
Anonymous #29
Anonymous #30
Anonymous #31
Anonymous #32
Anonymous #33
Anonymous #34
Anonymous #35
Anonymous #36
Anonymous #37
Anonymous #38
Anonymous #39
Anonymous #40
Anonymous #41
Anonymous #42
Anonymous #43
Anonymous #44
Anonymous #45
Anonymous #46
Anonymous #47
Anonymous #48
Anonymous #49
Anonymous #50
Anonymous #51
Anonymous #52
Anonymous #53
Anonymous #54
Anonymous #55
Anonymous #56
Anonymous #57
Anonymous #58
Anonymous #59
Anonymous #60
Anonymous #61
Anonymous #62
Anonymous #63
Anonymous #64
Anonymous #65
Anonymous #66
Apple fan boy
Motherf*cker
Hustle Man
Confucius
Mark Twain
Friedrich Nietzsche
Chewbacca1 -
Random af project idea that will see me burned alive by the internet (because if I do it I intend to put it in dev.to which is full of "that offends me" people):
Generate a classifier that will scan text from different websites and categorize where the person might be from.
Example: "plz send bob and vagene" <--- we all know
"mami que ricas nalgas" <--- Mexican for the most part.
"there, their, they're and similar text" <--- my fellow Americans for the most part....
"cyka blyat" <--- 0.o we know
"pompous statement about the way Americans do shit" <--- European, meaning, from Yurop.
"angry as fuck rant/banter" <-- German
"lol whatever Trump is the best president ever" <--- some moron from the south of the U.S (south much like myself but I am not a Trump supporter nor a republican)
etc etc.
What makes this complex is that I would have to put together my own dataset in the highly likely chance of something like that not existing already for me to use.
Can you imagine the chaos?11 -
MS Teams:
*Notification*: Bob sent you a message: "Hello netikras. Got a minute for a call? Andrew told me <...>"
Open up Teams, open chat with Bob. Last message received -- 2 weeks ago. Chat summary on the left (chats list) shows the last message was 2 minutes ago with "Hello netikras. Got a...."
Prolly just javascript failed to fetch the full message to display it in the chat.. refresh the Teams tab
Same thing.
How the f*ck do I read the full message? WHAT DID ANDREW TELL BOB????
Fucking Micro$oft... Ironically, the only thing they're good at is hardware. Well okay and the office suite.
Can't even make a working chat app that doesn't lose messages or doesn't behave like a three-headed dragon with multiple personalities in each head.2 -
I had to write a script to clean some crap from a database.
In particular it had some records containing multiple names and I had to split them.
It was really a nightmare because the separator was not always the same, e.g. "John, Mark and Bob" or "Alice+Mary".
«Ok, let's use a fucking regex: ",|(and)|\\+|/|&"»
Then, I realized there were some "Alessandro" in the database. Yeah, Aless(and)ro. Shit.
So I had eventually added more crap into the database.6 -
# Retrospective as Backend engineer
Once upon a time, I was rejected by a startup who tries to snag me from another company that I was working with.
They are looking for Senior / Supervisor level backend engineer and my profile looks like a fit for them.
So they contacted me, arranged a technical test, system design test, and interview with their lead backend engineer who also happens to be co-founder of the startup.
## The Interview
As usual, they asked me what are my contribution to previous workplace.
I answered them with achievements that I think are the best for each company that I worked with, and how to technologically achieve them.
One of it includes designing and implementing a `CQRS+ES` system in the backend.
With complete capability of what I `brag` as `Time Machine` through replaying event.
## The Rejection
And of course I was rejected by the startup, maybe specifically by the co-founder. As I asked around on the reason of rejection from an insider.
They insisted I am a guy who overengineer thing that are not needed, by doing `CQRS+ES`, and only suitable for RND, non-production stuffs.
Nobody needs that kind of `Time Machine`.
## Ironically
After switching jobs (to another company), becoming fullstack developer, learning about react and redux.
I can reflect back on this past experience and say this:
The same company that says `CQRS+ES` is an over engineering, also uses `React+Redux`.
Never did they realize the concept behind `React+Redux` is very similar to `CQRS+ES`.
- Separation of concern
- CQRS: `Command` is separated from `Query`
- Redux: Side effect / `Action` in `Thunk` separated from the presentation
- Managing State of Application
- ES: Through sequence of `Event` produced by `Command`
- Redux: Through action data produced / dispatched by `Action`
- Replayability
- ES: Through replaying `Event` into the `Applier`
- Redux: Through replay `Action` which trigger dispatch to `Reducer`
---
The same company that says `CQRS` is an over engineering also uses `ElasticSearch+MySQL`.
Never did they realize they are separating `WRITE` database into `MySQL` as their `Single Source Of Truth`, and `READ` database into `ElasticSearch` is also inline with `CQRS` principle.
## Value as Backend Engineer
It's a sad days as Backend Engineer these days. At least in the country I live in.
Seems like being a backend engineer is often under-appreciated.
Company (or people) seems to think of backend engineer is the guy who ONLY makes `CRUD` API endpoint to database.
- I've heard from Fullstack engineer who comes from React background complains about Backend engineers have it easy by only doing CRUD without having to worry about application.
- The same guy fails when given task in Backend to make a simple round-robin ticketing system.
- I've seen company who only hires Fullstack engineer with strong Frontend experience, fails to have basic understanding of how SQL Transaction and Connection Pool works.
- I've seen company Fullstack engineer relies on ORM to do super complex query instead of writing proper SQL, and prefer to translate SQL into ORM query language.
- I've seen company Fullstack engineer with strong React background brags about Uncle Bob clean code but fail to know on how to do basic dependency injection.
- I've heard company who made webapp criticize my way of handling `session` through http secure cookie. Saying it's a bad practice and better to use local storage. Despite my argument of `secure` in the cookie and ability to control cookie via backend.18 -
Things story points are great for:
- Helping the team estimate their workload for a sprint
- Discussing the relative complexity of a task / story
Things I will slap you for, hard:
- Arguing that all the easy stories you plan to pick are actually infinite story points to make you look better
- Going "yeahhhh look at me I did 5 more story points this sprint than Bob, I'm amazinggggg"
- Trying to subtly change the story point assignment after you pick a task so you can do the above while doing sod all work
- "Hmm your team only did x story points this sprint, but team poopoo over there did x+10, what's going on?!"4 -
Management: "You are the DBA and BI head right?"
Me: "yes..."
Management: "Awesome, so that means you can develop a quick software for me to use? It's really easy!"
Me: "Awesome, here are two options since its easy, you go make it yourself or..."
Management: "Is that sarcasm?"
Me: "...or you can ask the accountant to make it"
IT Director: "you deserved that bob." -
So I was planning on a single page website for my relatives hotel websitte and offered to make it for free ( as an offer for other huge project i was doing for same person )
But just got told that one of my uncle told to tell me that website design should like the website design of another hotel xyz.
For second, I thought that other would be very nice. So I checked it out.
Guess what! That other site looks like it hasn't updated since 2005! No HTTPS. No responsive design. Looks like fugly crap from 2005 to me. Has a huge Click to enable Adobe Flash banner on homepage.
I lost my hope in humanity and I quoted a price for making that. I guess I just gotta do a shit job and will get paid for it now 😂2 -
My Dev hero is without a doubt Robert C Martin (Uncle Bob). His books clean code and the cleans coder changed the way I program and his work on TDD too6
-
To my dear friends complaining about GDPR, if companies providing free services in exchange for users data didn't fuck up completely, there wouldn't be any GDPR. In history, regulations always come after people fuck ups, uncle Bob has some nice talks about that.1
-
My workplace has been forcing me to work everyday for almost a month now. I've been working at least 8-10 hours from Saturday to Thursday, and 2-3 hours on Friday as well. I'm so exhausted. I can't sleep properly. All I do is work. I have no time left to do things that I want to enjoy. I tried coding today but I'm too exhausted to do it. I was literally at 0 productivity today. I hate seeing my computer now. I don't know how to overcome this especially during the current lockdown situation. The work I do is not valued or appreciated and it's mentally breaking me honestly. I don't know what I want anymore. For sure another job but I need at least a temporary fix till the lockdown is over.
For those who know me or read through my profile, yup it's the same company. The reason I haven't left them even after all this is because this is a really tough time for me financially and I have no other sources of income and right now at my place there are no job opportunities. So the only option is to continue with the existing work place.6 -
Riddle:
Alice and bob want to communicate a secret message, lets say it is an integer.
We will call this msg0.
You are Chuck, an interloper trying to spy on them and decode the message.
For keys, alice chooses a random integer w, another for x, and another for y. she also calculates a fourth variable, x+y = z
Bob follows the same procedure.
Suppose the numbers are too large to bruteforce.
Their exchange looks like this.
At step 1, alice calculates the following:
msg1 = alice.z+alice.w+msg0
she sends this message over the internet to bob.
the value of msg1 is 20838
then for our second step of the process, bob calculates msg2 = bob.z+bob.w+msg1
msg2 equals 32521
he then sends msg2 to alice, and again, you intercept and observe.
at step three, alice recieves bob's message, and calculates the following: msg3 = msg2-(alice.x+alice.w+msg0)
msg3 equals 19249. Alice sends this to bob.
bob calculates msg4 = msg3-(bob.x+bob.w)
msg4 equals 11000.
he sends msg4 to alice
at this stage, alice calculates ms5.
msg5 = (msg4-(alice.y)+msg0.
alice sends this to bob.
bob recieves this final message and calculates
the sixth and final message, which is the original hidden msg0 alice wanted to send:
msg6 = msg5-bob.y
What is the secret message?
I'll give anyone who solves it without bruteforcing, a free cookie.16 -
If Uncle Bob Martin took all software engineers who are better in designing architecture than him, he could fully book Hilbert's hotel.1
-
I know people have mixed feelings about Uncle Bob and I really never followed the guy at all, but back in college I found his book Clean Code on a shelf and read it cover to cover. A lot of it really stuck with me. In fact, I might dig it up again now that I'm thinking about it.3
-
Anyone else have people that seem to constantly try to "prove" themselves to you in this weird, competitive way that only makes them seem... very annoying? I'll call him Bob here, but it's always something like:
Bob: Hi Almond, how's it going?
Almond: Ah not bad thanks, PSU blew up in the PC over the weekend though so that was a bit of a faff!
Bob: Ah no! How old's your PC?
Almond: Oh, like 7-8 years old now. I don't replace it often.
Bob: Really?! I replace mine completely every year.
Almond: Ah, cool.
Bob: Yeah, I'm a dev so I feel I need to. It's like my tool, you know.
Almond: Sure thing!
Bob: I actually spend quite a lot on it. I make sure it's got the fastest memory I can afford. Like, DDR5 stuff. That's really important, you know.
...etc., while I try to get out of said conversation for the next eternity.
Or:
(while in a conversation about a frontend bug I was looking at in Chrome devtools)
Bob: Hey Almond, you know Firefox actually had a plugin that did all this stuff before everything else?
Almond: Err, yeah, I think so. Used it back in the day.
Bob: It was called firebug. It was really good. Revolutionary.
Almond: Certainly was.
Bob: It was launched in January 2006 you know.
Almond: Right...
Bob: I used it back then.
...I mean damn, I'm all for being civil, but no-one cares you replace your PC every year, or that you know the year firebug was released, or that you once set up 5 identical PCs with different versions of Linux to run some benchmarks...14 -
I’M COMIC SANS, ASSHOLE
Listen up. I know the shit you’ve been saying behind my back. You think I’m stupid. You think I’m immature. You think I’m a malformed, pathetic excuse for a font. Well think again, nerdhole, because I’m Comic Sans, and I’m the best thing to happen to typography since Johannes fucking Gutenberg.
You don’t like that your coworker used me on that note about stealing her yogurt from the break room fridge? You don’t like that I’m all over your sister-in-law’s blog? You don’t like that I’m on the sign for that new Thai place? You think I’m pedestrian and tacky? Guess the fuck what, Picasso. We don’t all have seventy-three weights of stick-up-my-ass Helvetica sitting on our seventeen-inch MacBook Pros. Sorry the entire world can’t all be done in stark Eurotrash Swiss type. Sorry some people like to have fun. Sorry I’m standing in the way of your minimalist Bauhaus-esque fascist snoozefest. Maybe sometime you should take off your black turtleneck, stop compulsively adjusting your Tumblr theme, and lighten the fuck up for once.
People love me. Why? Because I’m fun. I’m the life of the party. I bring levity to any situation. Need to soften the blow of a harsh message about restroom etiquette? SLAM. There I am. Need to spice up the directions to your graduation party? WHAM. There again. Need to convey your fun-loving, approachable nature on your business’ website? SMACK. Like daffodils in motherfucking spring.
When people need to kick back, have fun, and party, I will be there, unlike your pathetic fonts. While Gotham is at the science fair, I’m banging the prom queen behind the woodshop. While Avenir is practicing the clarinet, I’m shredding “Reign In Blood” on my double-necked Stratocaster. While Univers is refilling his allergy prescriptions, I’m racing my tricked-out, nitrous-laden Honda Civic against Tokyo gangsters who’ll kill me if I don’t cross the finish line first. I am a sans serif Superman and my only kryptonite is pretentious buzzkills like you.
It doesn’t even matter what you think. You know why, jagoff? Cause I’m famous. I am on every major operating system since Microsoft fucking Bob. I’m in your signs. I’m in your browsers. I’m in your instant messengers. I’m not just a font. I am a force of motherfucking nature and I will not rest until every uptight armchair typographer cock-hat like you is surrounded by my lovable, comic-book inspired, sans-serif badassery.
Enough of this bullshit. I’m gonna go get hammered with Papyrus.
by Mike Lacher, https://mcsweeneys.net/articles/...3 -
Quote by Uncle Bob: “Never forget that, as programmers, you are stakeholders too. Your technical and ethical reputation is on the line. You have a say. You also have feet.”
-
I know I’ll get mixed views for this one...
So I’ll state my claim. I agree with the philosophy of uncle bob, I also feel like he is the high level language - older version of myself personality wise.. (when I learned about uncle bob I was like this guy is just like me but not low level haha).
Anyway.. I don’t agree with everything because I think he thinks or atleast I get the vibe he thinks everything can be solved by OOP, and high level languages. This is probably where Bob and I disagree. Personally I don’t touch ruby, python and java and “those” with a 10 foot pole.
Does he make valid arguments, yes, is agile the solve all solution no.. but agile ideas do come natural and respond faster the feedback loop of product development is much smaller and the managers and clients and customers can “see things” sooner than purly waterfall.. I mean agile is the natural approach of disciplined engineers....waterfall is and was developed because the market was flooded with undisciplined engineers and continues to flood, agile is great for them but only if they are skilled in what they are doing and see the bigger picture of the forest thru the trees.. which is the entire point of waterfall, to see the forest.. the end goal... now I’m not saying agile you only see a branch of a single tree of the forest.. but too often young engineers, and beginners jump on agile because it’s “trendy” or “everyone’s doing it” or whatever the fuck reason. The point is they do it but only focus on the immediate use case, needs and deliverables due next week.
What’s wrong with that?? Well an undisciplined engineer doing agile (no I’m not talking damn scrum shit and all that marketing bullshit).. pure true agile.
They will write code for the need due next week, but they won’t realize that hmm I will have the need 3 months from now for some feature that needs to connect to this, so I better design this code with that future feature in mind...
The disciplined engineer would do that. That is why waterfall exists so ideally the big picture is painted before hand.
The undisciplined engineer will then be frustrated in the future when he has to act like the cool aid man thru the hard pre mature architectural boundaries he created and now needs links or connections that are now needed.
Does moving to agile fix that hell no.. because the undisciplined engineer is still undisciplined.
One could argue the project manager or scrum secretary... (yes scrum secretary I said that right).. is suppose to organize and create and order the features with the future in mind etc...
Bullshit ..soo basically your saying the scrum kid is suppose to be the disciplined engineer to have foresight into realizing future features and making requirements and task now that cover those things? No!
1 scrum bitch focuses too much on pleasing “stake holders” especially taken literally in start ups where the non technical idiots are too involved with the engineering team and the scrum bastard tries to ass kiss and get everything organized and tasks working so the non technical person can see pretty things work.
Scrum master is a gate keeper and is not needed and actually hinders the whole process of making a undisciplined engineer into a disciplined engineer, makes the undisciplined engineer into a “forever” code grunt... filling weekly orders of story points unable to see the forest until it’s over because the forest isn’t show to the grunt only the scrum keeper knows the big picture..... this is bad this is why waterfall is needed.
Waterfall has its own problems, But that’s another story for another day..
ANYWAY... soooo where were we ....
Ahh yess....
Clean code..
Is it a good book, yes.. does uncle bobs personality show thru the book .. yes lol.
If you know uncle bob you will understand what I just did with this post lol. I had to tangent ( at least mine was related to the topic) ...
I agree with the principles of the book, I don’t agree with the extreme view point. It’s like religion there’s the modest folks and then there are the extremists. Well he’s the preacher of the cult and he’s on the extreme side.. but that doesn’t mean he’s wrong.. many things he nails... he just hits the nail thru the wall just a bit.
OOP languages are not the solution... high level languages do not solve everything.. pininciples and concepts can be used across the board and prove valuable.. just don’t hold everything up like the 10 commandments of which you cannot deviate from.. that’s the difference here I think..
Good book, just don’t take it as the Bible as a beginner, actually infact DONT read this book as a beginner. Wait a bit learn then reflect by reading this. 15
15 -
When Google Engineers Made a Speech Synthesis Program, they hadn't figured out a name until:
"What should we name our advanced speech synthesis program"
"Hey bob what are going to order for lunch today"
"Tacos."
"What was that weird movie with the laser bikes that make light walls"
"Tron."
"Bob you're a genius" -
I'd say Uncle Bob, since I ended up flying through his Clean Code book in order to get a placement job, but in reality, it's probably only partially that.
Most of my influence probably comes from the guy I shadowed under when I was on placement. He taught me way more than he probably ever realises.1 -
Due to resource scarcity, my manager Bob had lent me to other manager John. I started working on John's project and now there is a hardcore dependency on me, as I have done good enough work on it. I was also taking some small work items from Bob parallely so I can be up-to-date with my own team, Later Bob calls me and says he wants me back, since my own team has lot of pending tasks. John's project is still unfinished and will take longer then ever. So far, I am dividing my time between the two teams.
My concern is if I pass on John's project, will I even get recognized for it and since John will have no one concrete to work on his project, he will later keep bugging me for help.
And I feel like I don't belong to either of the teams (I am like a step son to both my parents) 😔1 -
I've built multiple profitable SaaS apps in my career, from scratch, by myself...
...but it's sure damn important to know wether fucking Cindy or Bob or neither can fit into a parking lot after muddling through stupid obtrusive rules that don't mean anything
"its to understand how you think"
yep, clearly don't know how to do that, that's why i'm taking this labrat, i mean, cognitive test
🐀🤡🐀🤡🐀🤡🐀🤡🐀🤡🐀🤡5 -
Every data communication example has Alice and Bob communicating with each other. I wonder after all these years how are they able to maintain a stable relationship.
I wish my girlfriend understood this. -
This rant is about myself and anyone whos like me: using logs over a debugger
So, sometimes when I wanna quick check something or make sure, if and when something get's executed or I've ran into a Problem, I add a few log/print statements to check in console.
But I don't think about proper and helpful messages, since they aren't supposed to stay in code. So I often type what comes in my mind, like memes or song lyrics.
The last time this became a huge act, was Code review/ Prototype demonstration with Clients (which I didn't knew about, otherwise I would have removed them, I swear) and Boss and my Code printed "show bob and va...", "send nudes" and stuff... in loop... to stdout2 -
Yes, pdf a’s code of some kind is indeed ends with a space, and that space is mandatory. Who let uncle bob specify anything, anything at all?
 5
5 -
!rant
This is more of a thought-related post. In the morning I stumbled across an article about artificial intelligence and the research from Facebook. I couldn't get around the thought of Elon Musk warning the people about uncontrolled developing of AI. The article was written about the experiment of Facebook, where two bots (Bob and Alice) were told to communicate with each other. As the developers "forgot" to implement a reward for using the English language, the bots started to change the grammar and spelling. They invented their own english-styled language, removing words that were too complex in their opinion. As soon as this happened, the researchers stopped the experiment, stating that they "couldn't follow what the bots were saying".
I wouldn't call myself a neural network expert, but I can understand why the bots could have behaved like that. But: Imagine that we invent an artificial intelligence with greater responsibility and just "forget" the reward for a specific task. If the AI will then try to increase it's own efficiency, I believe that we will be in alot of trouble.
Any thoughts on this are highly appreciated, as I think that this is a topic we should all look into (especially on a platform for developers).
Original article (german): http://gamestar.de/artikel/...3 -
Tomorrow, my team will receive TV reporters for an economy magazine.
We'll have to fake a meeting and the Marketing Officer insisted that everyone has to be present.
I wanted to do teleworking on that day because of the huge strike of the public transports.
Guess who will wake up at 5:45 tomorrow morning?2 -
After a code review where I identified an odd way a request was being generated, I suggested to the developer to utilize the Strategy pattern.
Knowing that the Strategy pattern probably wouldn't make sense in the current context, I told him I would put an example together by the end of the day.
I throw something together, sent it to him.
Go to the restroom, come back and 'Bob' says..
Bob:"There is my hero. Justin said you saved the world again. What was it this time? World hunger? Global warming? Ha ha ha."
Frack off you condescending kiss ass. Why don't you take 5 minutes to listen and understand the problem Justin was having instead of making fun of him?
Yea, I heard you this morning laughing at his code, monday-morning quarterbacking a solution in which you have no idea whats going on.
Heard your days are numbers anyway. Good riddance.1 -
"There is a reason that we keep our variables private. We don’t want anyone else to depend on them. We want to keep the freedom to change their type or implementation on a whim or an impulse. Why, then, do so many programmers automatically add getters and setters to their objects, exposing their private variables as if they were public?"
-Uncle Bob, Clean Code.1 -
Worst disturbance: me, with an ANC headset, listening to some music or documentary.
Then a burst of laughing coming through all this sound engineering – the VP marketing, discussing by phone with some 1K-followers "influencer".
Yeah, the same VP that says that she needs silence to focus on the email she's writing when the intern ask her some important question. -
What book/video/resource do you know that explains complex stuff in a simple and fun way?
I recently found "Carfting Interpreters" by Bob Nystrom. It explains how to create a new scripting langauge from scratch, It teaches you a lot about interpreters and compilers and virtual machines. And it's free!
http://craftinginterpreters.com//1 -
@dfox
Awesome devrant podcasts.
Seriously, if you enjoy devrant you will be really impressed with the two they have done so far.
Surprised at the five star guests they have gotten so far.
Just need to net Uncle Bob. -
Uncle Bob, Martin Fowler, Kevlin Henney, Doc Norton, Allen Holub.
They have all taught me great things about software development, whether through books or superb conference talks. -
Once upon a time, there was a cup of coffee aimlessly walking around the open fields of Alabama. He then realized he was not from Alabama and joined with his father the Sun.
That, my friends, is the story of the epic adventures of a sheep named Bob.
Basically, Stephen said unto me: "let there not be sheep", yet there still was.
The wonders of the modern world--the wonders!
I really do like chocolate.5 -
This comes up when I search on Google 'what is code' lol this looks like a bob the builder remake all about code

-
Betty: Opens slack chat with Bob, Tony and me to ask me to fix some data for a client who messed the setup. (Don’t worry just building a script that takes 3 hours to complete and that I must supervise)
Betty: Opens slack chat with Ron, Tim and me to ask me to force the system I made to ignore protocol because someone else’s fuck up made it so she didn’t get the output she expected.
Betty: proceeds to ask for status updates constantly on both chats. She also disguises them as her asking what she can do to “get it across faster” knowing there’s jack shit I or anyone can do to make it go “faster”.
Also Betty, vomits BS about my micro service being unstable in front of managers even though it is it’s correctness what brought to light a bug fucking up thousands of records silently.
Go fuck yourself Betty ☺️ and fuck the client4 -
After a horrible 11 months in probation I quit from my shitty job and got a new job with better benefits, better pay, better working hours and better co-workers (we'll see if that lasts).
However this new job turns out, I'm glad I got out of the toxicity of my old job and finally have some hope that things might work out after all.7 -
Is it just me or do you guys also bob your head back and forth in sync with the devRant logo when it takes too long to load?
-
2 years ago I thought you had to make an if statement for every coordinate in a game to make the character move1
-
Just read Uncle Bobs book series:
Working with Legacy Code,
Clean Coder,
Clean Code,
Clean Architecture
Read it in this exact order and each book was better than the one before.
What did you think of them and what other books do you recommend reading?
(Coding books of course)3 -
Just got done watching a 2 1/2 hours of Uncle Bob on programming. I really like his style of speaking. Great data and interesting viewpoints. Really easy to follow. I'd read some of his articles, but never listened to him before. Will definitely be watching more. For those of you in organizations using "agile" development and having a tough time of it, his talk called The Land that Scrum Forgot was really interesting.
And he really looks amazingly like my uncle, Tom, who's also been a programmer for decades! So I just think of him as Uncle Tom instead.1 -
So, I have a nested ternary, right, and that's not very readable:
(x <= y ? z : (x <= z ? y : x));
The linter points this out and I'm like yeah, valid point. So I inline-F[*0] it:
if (x <= y)
········return z;
else if (x <= z)
········return y;
else
········return x;
Clearer? Kinda. Oh, but the linter doesn't like this either, and to be fair, valid point once again; an else-after-return *can* be quite confusing if you have it in the __middle__ of the F body, catches you by suprise.
However, I'd like to take a brief moment to waggle your nutsack, if you please. Because this is C++ and I'm picking a reference from a list of values, so I can't simply assout[*1] within the switch.
So I'm at the crossroads of life once again, losing man's toughest struggle as I sit on a metaphorical cigar, squirming while I unclench my asshole slowly for strictly defecatory purposes. Allow me to illustrate:
- If I ignore the linter, and leave the rest of the code unchanged, the checks are going to fail and the bot is going to taint my pristine PR with automated comments.
- But if I take the linter's advice, I have to do a slight rewrite of the damn thing plus every F that calls it, which means touching shit that has nothing to do with this issue.
So what's it gonna be? Flushing or shoving my own excrement? Oh, the thrills of it being (literally) SOLID, ie not the acronym, but may the Almighty punish Uncle Bob regardless.
NOTES:
[*0]: It means 'function,' what else?
[*1]: ASS-ign OUT-put, where 'out' is just some var. You modify the var within the F body and return the final value.20 -
Let me just say that I've been playing whack a mole with a new feature for while now. And it's becoming very tiring.
TLDR; CTO is changing the way we're going to implement this, every other day.
June 1st,
CEO: let's implement feature AAA,
CTO: we're going to have a call with Andy to tell us all about his product that will make this super easy, call will be June 4th.
Days before June 4th,
Me: Researchs product X, makes demo works flawlessly.
June 4th,
Call all good, few tips from Andy. We come to the pricing section of Product X
CTO: this will not work, pricing doesn't fit on our budget, fair enough.
June 7th -11th
Me: research altenative approach. Makes second demo.
CTO: Works good, seems to have too many moving parts, let's have call with Bob to check Product Y. It should make our lifes easier.
ME: Geee, ok let's check it out.
June 14th,
Call with Bob, all good, product has a fair price, stuff is experimental.
CTO: let's use Product Y, and just use what we get from their api now, and worry about changes later.
Me: Hmmm, that's a bit risky, but ok, you the boss, right?, starts again new demo. API doesn't work as documented.
Lots of trial and error to figure out how the api is working now, finally demo works well,
June 17th,
API changed, now it works as documented, (expected as it is experimental), previous demo doesn't work anymore.
June 18th,
Redoing research. inputs are completely different from Product Y now, need to redo all that is working and do and a lot more of research.
Go live is scheduled for end of next week, I hope that the API is stable now, and that I get to go live on schedule.
It is funny to see, that it would probably been the same if we just waited on the API to stabilize, and check the pricing section before choosing a product? Who knows.
Anyways, I actually feel happy that over the years I developed the patience to work with ever changing situations like this one.4 -
My mentor to me when I joined the job fresh out of college (in a somewhat dramatic tone, which is why I remember it so vividly):
"Gone are the days when you wrote programs with a small number of big functions, and lots of comments. Write code which is easy to read by humans - small functions which do 1 thing and are named after the 1 thing it does."
TL,DR: well named modular code. -
uncle bob and his “cLeAn aRcHiTeCtUrE” was a setup all along. His teachings were conceived by managers, the most useless part of our field, to cripple and disempower developers. They wanted to make our work excruciatingly slow and unnecessarily difficult, so they could maintain their job security.
It is obvious that if you were to ditch all that useless boilerplate, the work process becomes way easier, quicker and more streamlined. In that scenario, managers aren’t needed, at all.
They have played us for absolute fools. uncle bob is the biggest disgrace to ever happen to our field. Let’s leave this dark chapter in the past and move on into the world of quick, effortless development, with happy engineers, happy business and the complete lack of burnout. Also, it is time to make managers a thing of the past.7 -
Rejected for the job . Out in technical round, though i gave all the correct answers.
Me: seating outside with a down face.🦁
HR: what happened? you seems to bit low .
Me: sir ,got rejected in technical round.🐷
HR: work on mistakes.
Me: yeah sir🦊
Inner me: tell me the mistakes fucker...
Why ? Why? Why?
Dealing with rejection for no reason 🐀17 -
when i look at the code structure of the project i work on with my friends, i always think about how to implement the SOLID principles of bob martin for clean code
... and then i think about the clusterfuck of almost unmaintainable code that has been created over time and all the unit testing that doesn't exist at all and how much time and effort it would need to correct that code and how i realize that i don't even understand the principles and how to implement them
... and then i give up and go on coding even more mess
... and then i repeat😅😖😩3 -
<rant>
FFS
Windows is the worst garbage ever...
First I get a virus becouse the antivirus didn't fucking work, then I try and do a system reset WICH FAILS, them u have to get into the uefi and do a system reset back to Windows 8, Windows 8..
So I go to the windows insider program and download the media creator thing and
.
.
IT DOESN'T WORK
It just stops at "searching for updates"and now I'm stuck with Windows 8
I can't even get the Nvidia drivers so i can't play games anymore
A big fuck you to Microsoft and merry Christmas
Btw any fixes? Thank you
</rant>9 -
Through Microsoft Virtual Academy, Watched Bob Tabor's awesome C# tutorial.
I used MBA because it had something like a point system which resets every month, made me want to learn more so I end up on top of the list.1 -
Wondering about how I should continue with my blog.
One the one hand, Ive always liked the video format Uncle Bob uses, and I think Id actually find it easier to talk about my ideas rather than write about it.
On the other hand, I know a lot of people prefer a written article they can read at their own pace.
Thinking I might try a hybrid of some sort, like record a vlog and then write the article afterwards, using the video for reference since I already got the words out.2 -
My new boss just asked me why I, a grown man had a minion figure at my desk. I told him it was Bob and it's from where they found their new master or boss - so since I just found my new boss it made sense right?
- Now I'm not sure if he thinks I'm a freak or funny.3 -
big project at uni
group of 4
collectively decide to use LaTeX to write the documentation (like 50 pages or so)
me and one team memeber (bob) had TeX experience, and decided to write a cheat sheet for the others
bob says he'll make it
fast forward a few days
bob commits and pushes a docx file called "LaTeX Cheat Sheet.docx"
... que?2 -
I'm starting on C# and some of the lesson plans out there dont make sense. So far Bob Tabor and Plural Sight has helped me half way and the bulgarian shark book too. What has helped you cross that threshold past the basics. I'm stuck on structs, namespaces, sort algorithms, sql and json.6
-
I'm currently having a problems sleeping my inner philosopher just keeps thinking about various things. I wanna try to write some of them down as an simply to see what will happen.
I'll write my opinion down as honest as possible so feel free to disagree, but point out what I should rethink, if you want me to consider it.
To me respect has to be earned. I think especially on the internet many people try to skip this crucial step when they try to get respect. Most often when they want an opinion or their ideals to be respected. Most of the time it doesn't even feel like they want to be respected, but rather accepted.
There's nothing wrong with accepted in my opinion, but there are several approaches to get to this point and I despise some of them.
Earning acceptance by earning respect is one of the right ways to do it. Working hard towards your goals, showing your individual strength, standing behind your ideals. These are things I can respect.
I should also mention that these Ideals should be concrete, based on rational thought and a general good will or you will just twist my words to say that I support e.g. IS, Stalin's politics ect.
On a side node, I think it'd be wrong to disrespect everything Stalin did, since, from an economical point of view, he pushed Russia forward by quite a bit.
Then on the other side I see crybabies. People who want to be accepted, without putting effort in their ideals. Most of the time not even aiming for acceptance through respect, but through pity. Honestly, that's all they're going to get from me.
Pity, for their petty ideals.
Basically all I ever see these people doing is attention whoring and practicing multiple deadly sins at once.
Wrath, jealousy, sloth, pride, greed and optionally also gluttony.
Lust is rather a separate package. When I think about it, I link it mostly to horny teens and "send bob and vegane" type of stuff.
Gluttony being powered by sloth or vice versa, enhancing it.
The clear image I have in mind, while I write about this packages of deadly sins however, is that of a jealous person, complaining / getting angry about something they could change change themselves, but want them to be changed for them. Mostly through social networks such as Facebook, Twitter and whatever the fuck Tumblr is supposed to be.
"I wanna be rich, why is <person> richt but I'm not? This world is so unfair 😡". Have you tried working towards becoming rich?
"I don't don't feel pretty. Accept me". Accept yourself. Done.
"I don't like <person or organization>'s doing". If that's the whole message, all you probably did so far is complaining or crying. Sweet tears.
Stuff like that can happen to any person, just like any person makes mistakes.
Mistakes are made to learn from them. If you realize realize and accept your mistakes others may do so as well and forgive you.
But we are he towards this idiotic trend where people just can swallow their pride even for microscopic things. They instead push their pride to higher levels of ignorance, blaming other people, l(ying)mfao, creating black holes of density in the process. Makes me wonder whether their real motive is an inside bet on who can get the most people to kill them selves by face palming.
Most of my life I have been fairly protected against these people, besides some spikes of incompetence, but recently the have invaded 2 areas in my world that make the world somewhat less of a pain. Programming and the internet culture.
Yes, I'm talking about that master / slave BS renaming and article 11 and 13.
The remaking itself isn't really the problem, but rather the context. This was basically a show of power for the self proclaimed "social justice warriors" or SJW for short.
The fact that this madness has spread. That's what worries me. To me it feels like the first zombie has spawned.
Then we have this corrupted piece of incompetent shit, called Axel Voss, and other old farts.
They live in a galaxy far away from reality, somewhere in the European Parlament, making laws they don't know shit about, regulating things they know shit about.
All in the name of the people of the EU of course. And by people we obviously talk about the money.
I can honestly not think of another reason, after reading the replies Voss and his party gave on Twitter regarding the shit they pulled off.
Well, at least none that doesn't involve some firm of brain death.
For now I'll show them as much as possible how much I despise / reject them. Currently playing with the thought of some kind (social media?) website were posts from other sites or actions in general can be rated only with "Fuck you"s.
Given these articles, I should not have them hosted in an European country though 😅.
Almost hitting that 5k character limit 😰1 -
So at the HS I go to, there are 4~5 programmers (only 3 real "experienced" ones though including me).
So coming from JS & Python, I hate Java (especially for robotics) and prefer C++ (through some basic tutorials).
Programmer Nº2 is great at everything, loves Objective-C, Swift, Python, and to a certain extent Java.
Programmer Nº3 loves Python and used to do lots of C#, dislikes Java and appreciates Go (not much experience).
So naturally I get shit on (playfully) because of my JS background, because they don't understand many aspects of it. They hate the DOM manipulation (which is dislike too tbh), but especially OOP in JS, string/int manipulation, certain methods and HOISTING.
So, IDK if Java or C++ (super limited in them) have hoisting, but if you don't know what hoisting is, it means that you can define a variable, use it before assigning a value, and the code will still run. It also means that you can use a variable before defining it and assigning a value to it.
So in JS you can define a variable, assign no value to it, use it in a function for instance, and then assign a value after calling the function, like so:
var y;
function hi(x) {
console.log(y + " " + x);
y = "hi";
}
hi("bob");
output: undefined bob
And, as said before, you can use a variable before defining it - without causing any errors.
Since I can barely express myself, here is an example:
JS code:
function hi(x) {
console.log(y + " " + x);
var y = "hi";
}
hi("bob");
output: undefined bob
So my friends are like: WTF?? Doesn't that produce an Error of some sort?
- Well no kiddo, it might not make sense to you, and you can trash talk JS and its architecture all you want, but this somehow, sometimes IS useful.
No real point/punchline to this story, but it makes me laugh (internally), and since I really want to say it and my family is shit with computers, I posted it here.
I know many of you hate JS BTW, so I'm prepared to get trashed/downvoted back to the Earth's crust like a StackOverflow question.6 -
In python, is there a way to make this work?
----------
# list of people
people = ["Nick", "Sue", "Bob"]
# class instance
Bob.pockets = ["gum", "paperclip", "coins"]
# convert string to prefix of a class instance
Print(people[2].pockets())
----------
This is the simplest way to show what I'm needing to figure out.
I need to convert a string into the prefix of a class instance.
I'm having trouble figuring it out.7 -
“The proper use of comments is to compensate for our failure to express yourself in code.” – Uncle Bob Martin2
-
!Rant
Does people add in @dfox and @trogus so that they can point out that it isn't a feature yet when/if they see the rant2 -
Want do you think about the idea that if the world of development does not develop best practices and standards that governments will see it as a threat and try to regulate standards? It is something Bob Martin talks about.
-
I have multiple ones, my uni has for one several amazing professors that I admire. Then there's there's the classics Thompson, kernighan, djikstra et al. T.A.D, uncle Bob and last but not least Stallman
All of them has provided insights, knowledge and a better way to view code and software -
Bob Dylan:
Next one for John Carmack, please. (at least according to http://kotaku.com/5975610/... ) -
I learnt programming basics in C language in highschool because it was taught there and I was pretty good with grasping concepts. However, I had no intention to have career in programming or had clear idea where / how to apply programming knowledge. It was only after i made half way thru college on a stream i lost interest in...that my sense kicked in and I watched Bob Tabors C# lessons on MVA that I really felt like i know programming. Now i can't imagine doing anything other than coding / being a dev.
-
Be agile, practice patterns, read the core literature (GoF, uncle Bob...)
Actually finish a pet project. -
Audience question to Uncle Bob: Which parts of the code do you unit test? What about code coverage?
Uncle Bob: Well (chuckling).. You test the parts of the code that you want to work. -
Bob the builder
Bob the builder sucks
This show is about Bob and his friends fixing things and going on adventures
Bob is an idiot
Wendy is awful.
Scoop is annoying.
Muck is stupid.
Leo is dumb.
Thank god they got cancelled in 2011 2
2









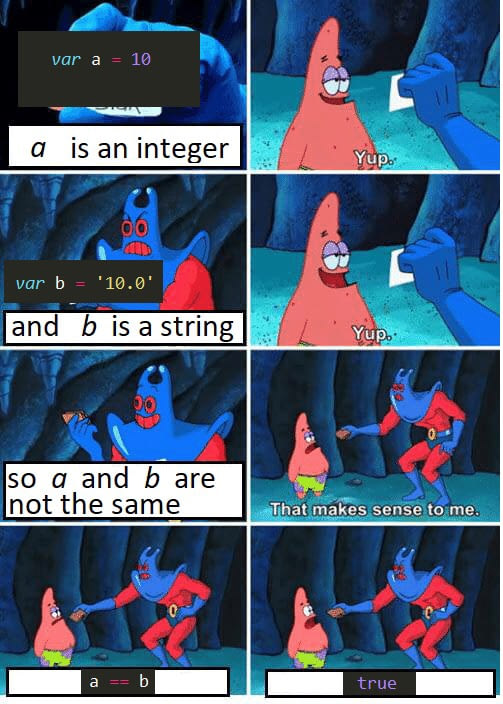




































































































































































Top Tags
Weekly Rant
View